In this short article we show the effect of moving the ECEF of a Base Station on the rover position to more forcefully demonstrate that whatever the Base Station says, be it right or wrong, the rover will follow. Hence it is very important that the frame of reference used by the Base Station is correct and understood by the rover users.
In this example, we use the station AZU1 (AZUSA) as the rover and the nearby station SCSC as the Base (at a distance of 6556.19 meters). We will be changing the ECEF position while the navigation filter is running and plotting the results using the popular tool RTKLIB for this.
This demonstration has more practical effect when there is a need to align different Base Stations to common frame of reference. This need often occurs because nearby station operators have selected a different frame of reference. SNIP‘s® PFAT™ transformations provides a simple way to correct this.
Consider a “rover” device located as shown in the plot at left below. The current ECEC value for the base station are shown at the right, in the group box labeled “Device Values, as sent by Base Station”
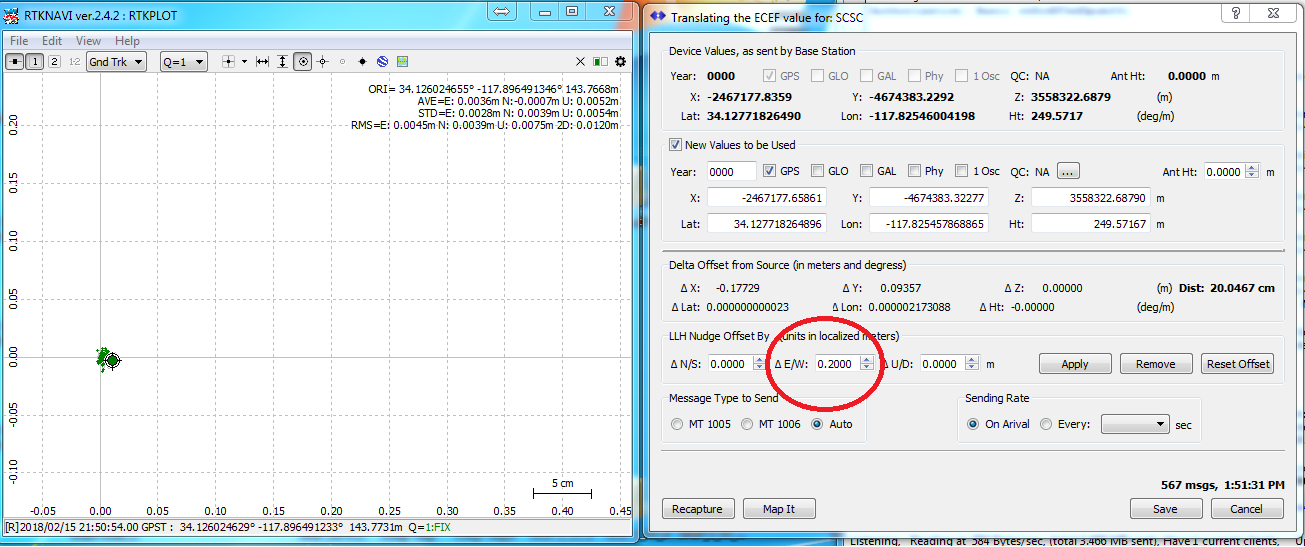
There are several ways in which to enter a new ECEF location. In this article we will use the “nudge” ability. It is generally simpler to directly enter LLH or XYZ values when they are known. Using nudge is best when simply trying to move the position a definitive amount.
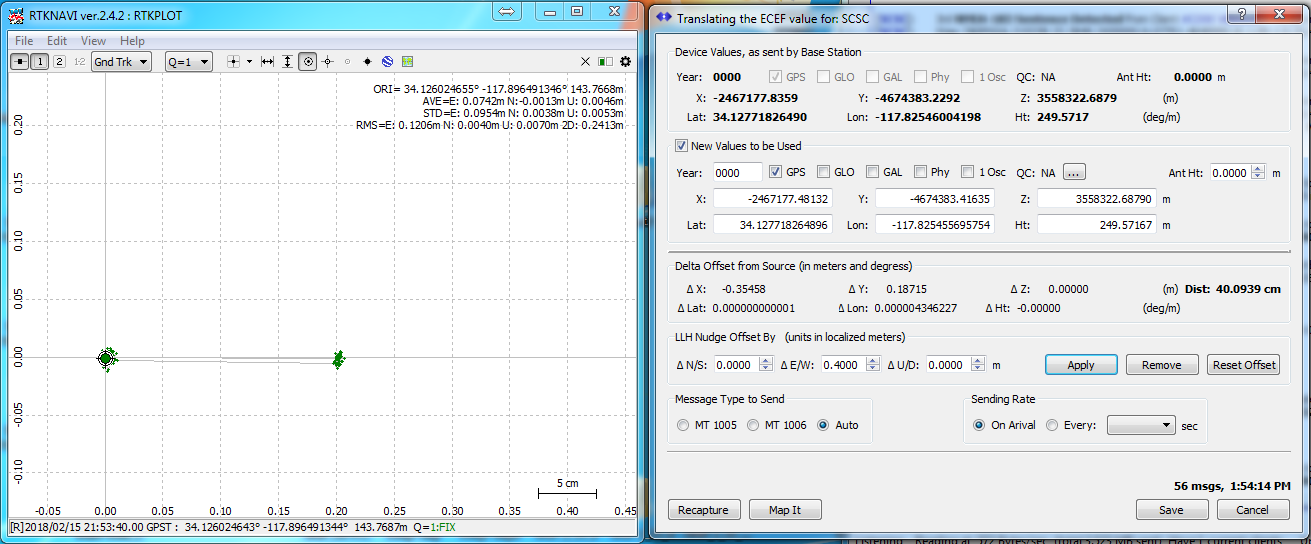
Look closely at the group box above marked LLH nudge where a value of +20cm has been added to E/W direction. The apply button has been pushed in the image above and the resulting vector distance seen. When we press the Save button, and wait for the normal parsing process to compete (a matter of tens of seconds) the plot below results.
If we repeat this, adding +40cm to the Eastern direction, setup details are is as shown below;
When active we then get the new plot position on the right. If we then added another +20 cm, we get:
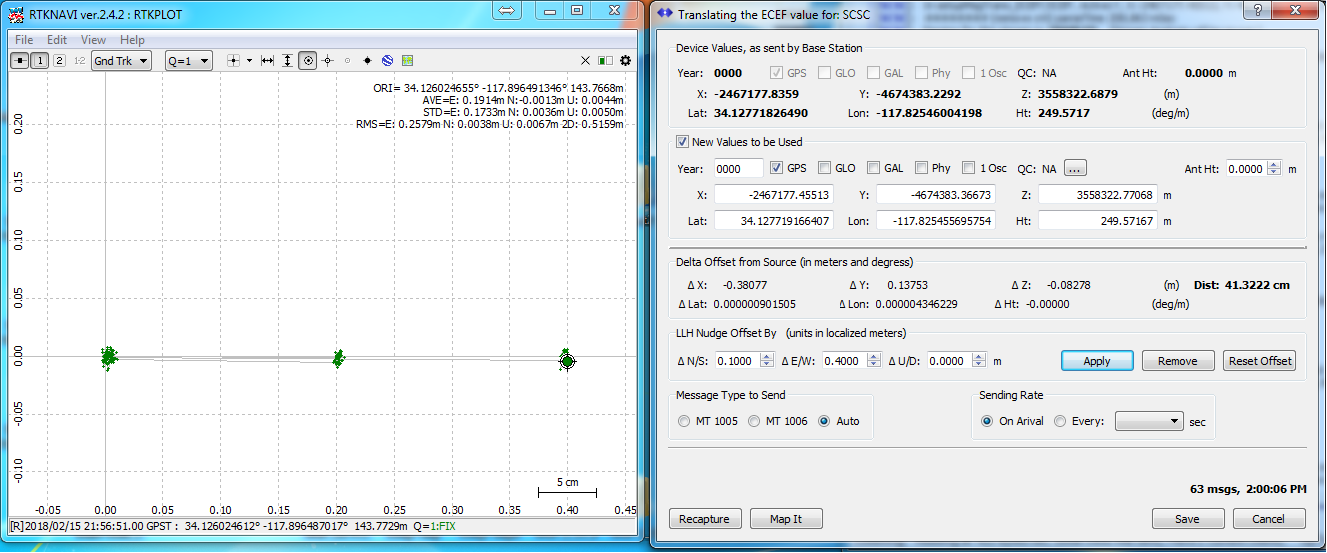
The shift in the rover position from this can be clearly seen. Applying a final offset of +10 cm to the North/South direction results in the below.
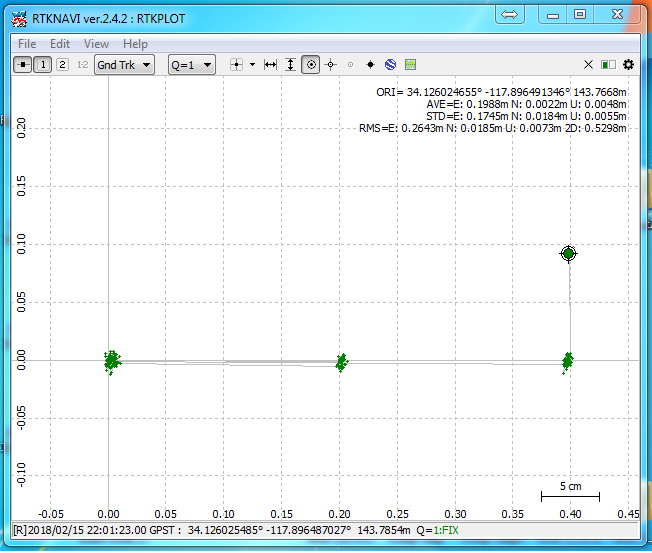
This article serves to show a more iterative plot of how base station movement is reflected in rover movement. As a general rule, this sort of change is made during network setup and not changed thereafter. Also, it should be observed that many RTK navigation filters (RTKLIB included) seem to maintain prior state data about the older location and may not re-converge as quickly as a similar filter which has been started and stopped.
Helpful Hint: You can use the nudge operations multiple times in a row and then over again if the dialog is dismissed and called back. But it is generally cleaner to restart with the original position each time (simply press the Recapture and Reset Offset buttons to do this). If, as an example, you want to move 12.340cm North and -3.546cm West, simply enter that (recall that West is negative). SNIP will take take of the local ellipsoidal details adding fraction of a mm as needed.
Other Examples
A more realistic use use of SNIP‘s ability to translate the ECEC values is given in this article where a small network with three different frames of reference is aligned to a common one.
Where is the Control…
The dialog to move a Base Station ECEF is found in the PFAT menu section, under the Translations items. It can also be reached by clicking on the Translate icon in the PFAT View Settings dialog.